▶︎

Control engineer. I work on aerial robots and other autonomous systems — from modeling and control design to embedded implementation and testing.

With Sapienza Flight Team, designed planning and control architecture for vertical and transition flight modes, including safety features. Validated in simulation and field tests.

Built ground-up: 3D-printed chassis, hand-soldered circuit, Kalman-filtered state estimation, and a custom PID control law in C++. Runs on Arduino.
Publications and theses.
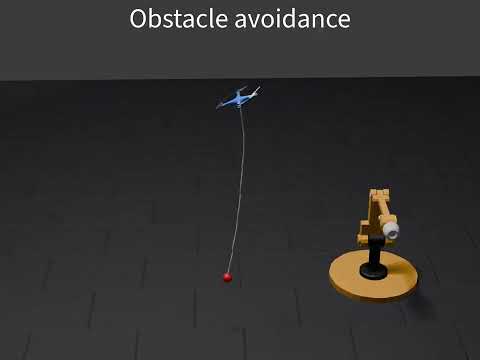
A. Rapuano, Y. Shen, F. Califano, C. Gabellieri, A. Franchi · Accepted at IEEE ICRA 2026
Master's thesis · Sapienza University of Rome · 110/110 cum laude
Bachelor's thesis · University of Sannio · 110/110 cum laude
Co-founding a robotics startup focused on aerial manipulation.
SOAR-Touch project. Soft optical tactile sensing for energy-efficient aerial interactions. Control + tactile perception on a hexarotor.
Tilt-rotor VTOL for the SUAS Competition. Planning and control software for vertical and transition flight. Validated in simulation and field tests.
Race-day timing setup and real-time results validation. Progressed from technician to team lead.
Working on modeling and control for aerial manipulation.
Thesis on nonlinear predictive control of a suspended deformable cable for aerial pick-and-place.
Thesis on FPGA implementation of an electronic circuit controlling a mechanical arm.